近日,我校機電工程學(xué)院“智能傳感與集成化檢測系統(tǒng)”團隊在國際頂級學(xué)術(shù)期刊Chemical Engineering Journal(IF=16.744)上發(fā)表了題為“Inchworm-Inspired Soft Robot with Magnetic Driving Based on NdFeB, EGaIn and PDMS (PEN) Combination”(DOI:10.1016/j.cej.2023.142994)的研究論文�。團隊負責人關(guān)炎芳、2020級碩士研究生劉彥勝為共同第一作者���,吳蘭為共同通訊作者�����,河南工業(yè)大學(xué)為論文第一署名和通訊作者單位�。
部分成果內(nèi)容
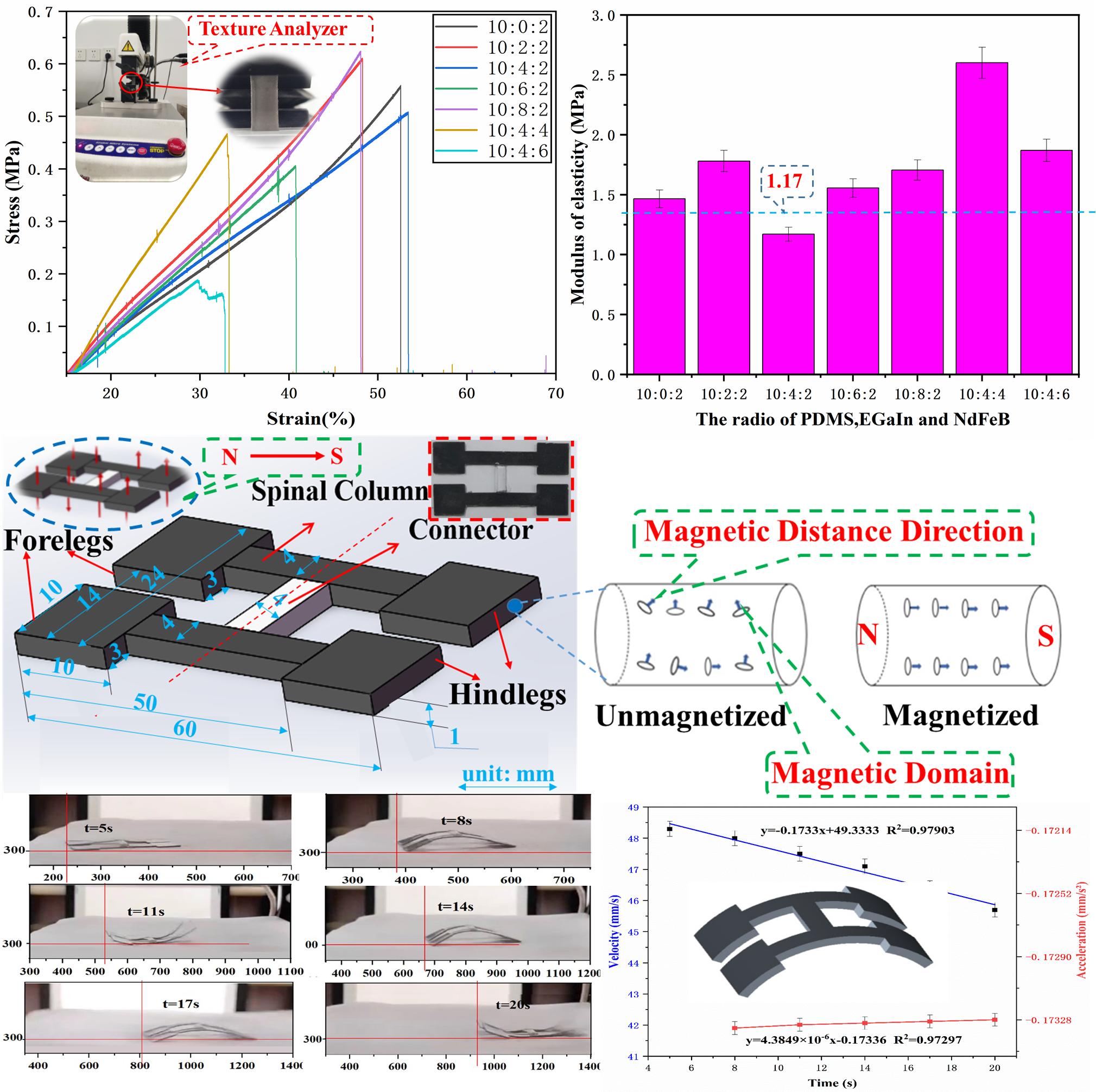
針對軟體機器人應(yīng)用中存在的柔韌性差����、力學(xué)性能不高、可靠性低等問題��,本論文以柔韌性好��、流動性強����、化學(xué)性質(zhì)穩(wěn)定和可拉伸的共晶稼銦(Eutectic gallium indium,EGaIn)液態(tài)金屬作為功能材料��,通過填充超強磁性和高導(dǎo)熱性的釹鐵硼納米顆粒(Neodymium iron boron,NdFeB)���,并與具有良好生物相容性的聚二甲基硅氧烷(Polydimethylsiloxane��,PDMS)相融合���,制備出具有抗撕裂能強、彈性模量低��、溶脹度小的仿尺蠖軟體機器人�����。實驗表明���,液態(tài)金屬共晶鎵銦和釹鐵硼的加入��,降低復(fù)合材料的熱膨脹系數(shù)��,提高其熱穩(wěn)定性和耐酸堿腐蝕性。
搭建軟體機器人磁控實驗平臺�,建立仿尺蠖運動模型,改變磁場方向和大小����,以控制尺蠖軟體機器人的多自由度形變��,通過抗疲勞性能測試以及軟體機器人單腿和雙腿運動軌跡分析��,實現(xiàn)復(fù)雜多樣化的應(yīng)用場景�����。結(jié)果表明���,EGaIn的添加增強了NdFeB的磁響應(yīng)度、磁操控性和磁積能����,同時提高了仿尺蠖軟體機器人的運動速度(48.3mm/s),可靠性和壽命�,展現(xiàn)了良好的磁控靈敏度和運動穩(wěn)定性,為軟體機器人發(fā)展提供新的思路和方向���,有望在軍事探測�、智能糧倉和生物給藥等領(lǐng)域帶來新的發(fā)展機遇����,拓寬軟體機器人的應(yīng)用范圍��。
機電工程學(xué)院高度注重科研團隊建設(shè)�����,大力支持教師開展有組織的科研工作�����。智能傳感與集成化檢測科研團隊致力于智能傳感與集成化檢測裝備��、柔性電子與可穿戴設(shè)備�、生醫(yī)工程等交叉領(lǐng)域研究��,先后獲得國家自然科學(xué)基金�����、河南省科技攻關(guān)����、鄭州市科技協(xié)同專項等多項課題支持,取得系列研究成果��,在國際知名期刊Lab on a Chip���、Microsystems & Nanoengineering���、Composite Structures、Langmuir����、ACS Omega、Biomedical microdevices�����、Sensors and Actuators A Physical�、Micromachines等期刊發(fā)表高水平論文20余篇。






{kind=link}